
I am a second-year Ph.D. student in Institute for Interdisciplinary Information Science (IIIS) at Tsinghua University, advised by Prof. Yang Gao. Previously, I obtained my bachelor’s degree from Department of Computer Science and Technology, Tsinghua University.
My research focuses on Embodied AI, an interdisciplinary field integrating robotics, computer vision, and natural language processing. Specifically, I aim to enable robots to achieve human-level manipulation capabilities through large-scale data. I’m also passionate about leveraging foundation models to empower robots.
🔥 News
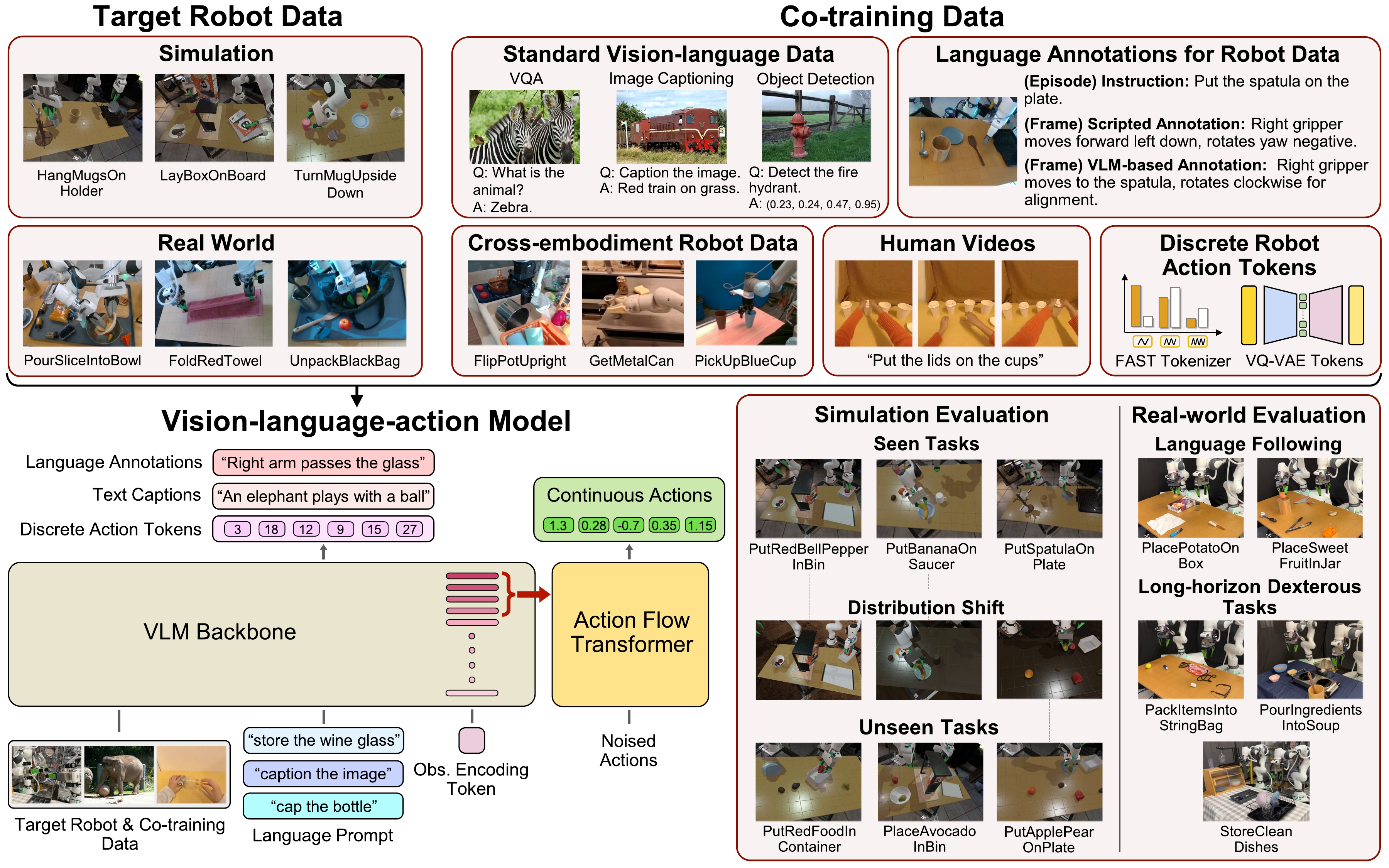
- 2026.02: We release “Systematic Study of Data Modalities and Strategies for Co-training Large Behavior Models for Robot Manipulation”, developed during my internship at TRI
- 2026.01: OneTwoVLA is accepted by ICLR 2026
- 2025.08: HuB is accepted as Oral by CoRL 2025
- 2025.06: Research Intern at TRI LBM team, working with Prof. Russ Tedrake
- 2025.02: Data Scaling Laws is accepted as Oral by ICLR 2025
- 2024.11: Data Scaling Laws won the Best Paper Award at the 1st X-Embodiment Workshop at CoRL 2024
- 2024.06: CoPa is accepted as Oral Pitch by IROS 2024
- 2024.04: ViLa is accepted by ICRA 2024 VLMNM Workshop
- 2023.02: TiZero is accepted by AAMAS 2023
📝 Selected Publications
Fanqi Lin, TRI LBM Team
Project Page / Paper / X Summary
- We present a large-scale empirical study leveraging 4,000h of robot/human data and 50M vision-language samples, evaluating 89 policies across 58,000 simulation rollouts and 2,835 real-world trials.
- Built on a VLA architecture, our study dives into 5 common co-training data modalities across different training strategies. We conduct a large-scale evaluation in both sim and real, rigorously benchmarking policy performance across multiple dimensions, offering a systematic understanding of co-training and practical guidance for building scalable generalist robot policies.
OneTwoVLA: A Unified Vision-Language-Action Model with Adaptive Reasoning
Fanqi Lin*, Ruiqian Nai*, Yingdong Hu*, Jiacheng You, Junming Zhao, Yang Gao
Project Page / Paper / Code / Data
- Introducing OneTwoVLA, a single unified VLA model capable of both reasoning and acting, and can adaptively switch between two modes. OneTwoVLA demonstrates superior performance in the following capabilities: long-horizon task planning, error detection and recovery, natural human-robot interaction, and generalizable visual grounding.
- we design a scalable pipeline for synthesizing embodied reasoning centric vision-language data, used for co-training with robot data, which further unlocks OneTwoVLA’s reasoning and generalization capabilities.
Data Scaling Laws in Imitation Learning for Robotic Manipulation
Fanqi Lin*, Yingdong Hu*, Pingyue Sheng, Chuan Wen, Jiacheng You, Yang Gao
Project Page / Paper / Code / Summary / Models / Processed Dataset / Raw GoPro Videos
- Fundamental scaling laws: policy generalization performance to novel environments and objects follows a power-law relationship with the number of training environment-object pairs.
- Efficient data collection strategy: we gathered enough data to train policies with ~90% success on two tasks in any novel scenarios in one afternoon with 4 data collectors.
HuB: Learning Extreme Humanoid Balance
Tong Zhang*, Boyuan Zheng*, Ruiqian Nai, Yingdong Hu, Yen-Jen Wang, Geng Chen, Fanqi Lin, Jiongye Li, Chuye Hong, Koushil Sreenath, Yang Gao
Project Page / Paper / X Summary
We propose HuB (Humanoid Balance), a framework that enables humanoids to perform challenging quasi-static balance tasks, including extreme single-legged poses such as the Swallow Balance and Bruce Lee’s Kick.

CoPa: General Robotic Manipulation through Spatial Constraints of Parts with Foundation Models
Haoxu Huang*, Fanqi Lin*, Yingdong Hu, Shengjie Wang, Yang Gao
Project Page / Paper / Code / Summary
- CoPa is a novel framework that incorporates common sense knowledge embedded within foundation VLMs into low-level robotic manipulation tasks.
- CoPa is capable of handling diverse open-set instructions and objects in a zero-training manner.
Look Before You Leap: Unveiling the Power of GPT-4V in Robotic Vision-Language Planning
Yingdong Hu*, Fanqi Lin*, Tong Zhang, Li Yi, Yang Gao
Project Page / Paper / Video / Summary
- We introduce ViLa, a novel approach for long-horizon robotic planning that leverages GPT-4V to generate a sequence of actionable steps.
- ViLa empowers robots to execute complex tasks with a profound understanding of the visual world.
TiZero: Mastering multi-agent football with curriculum learning and self-play
Fanqi Lin, Shiyu Huang, Tim Pearce, Wenze Chen, Wei-Wei Tu
Paper / Code / Match Video
We introduce TiZero, a self-evolving multi-agent system that combines the JRPO algorithm with curriculum self-play in a large-scale distributed training framework, achieving state-of-the-art performance in the GFootball 11 vs. 11 game.
🎖 Honors and Awards
- 2025.10: Huawei Academic Research Scholarship
- 2025.10: Lingjun Pioneer Scholarship
- 2024.11: ByteDance Academic Research Scholarship
- 2024.06: Outstanding Graduates of Tsinghua
- 2023.10: Excellent Comprehensive Scholarship of Tsinghua University
- 2022.10: Excellent Academic Scholarship of Tsinghua University
- 2022.10: Excellent Social Work Scholarship of Tsinghua University
- 2020.09: Freshmen Scholarship of Tsinghua University
- 2020.07: 3rd in Zhejiang Province College Entrance Examination